Jak funguje (nejen modelářský) elektromotor?
Principem fungování elektromotoru je přeměna elektrické energie na mechanickou, případně naopak, vzpoměňte si na dynamo na kole nebo alternátor v autě. Rotor motoru se roztáčí střídavým přitahováním a odpuzováním elektromagnetů (cívek) a pernamentních magnetů. V komutátorovém motoru je rotor tvořen cívkami, v bezkartáčovém motoru pernamentními neodymovými magnety. Postupným pouštěním proudu do jednotlivých cívek - elektromagnetů se mění jejich polarita a tím se přitahují a odpuzují od pernamentních magnetů a motor se roztáčí (jednoduše řečeno).

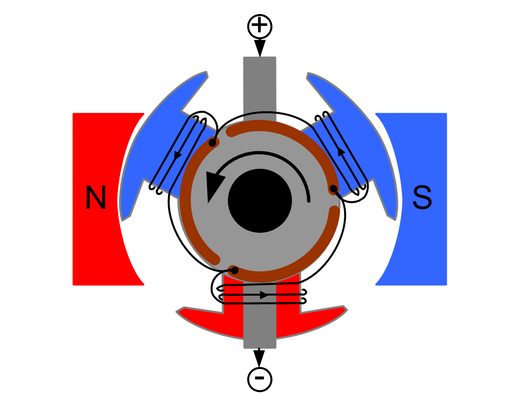
U stejnosměrných kartáčkových motorů zajištuje spínání cívek komutátor s kartáčky - každá ze tří lamel je propojena s jednou ze tří cívek, kartáčky jsou dva, schéma funkce je vidět na tomto obrázku.
Bezkartáčový stejnosměrný motor funguje obdobně, spínání cívek však nezajišťuje mechanicky komutátor, ale elektronicky regulátor a to postupným otevíráním a zavíráním výkonových tranzistorů. Proto vedou z regulátoru do motoru tři vodiče, je to obdoba propojení komutátoru a cívek u motoru s kartáčky. Ale proč je cívek mnohem více?
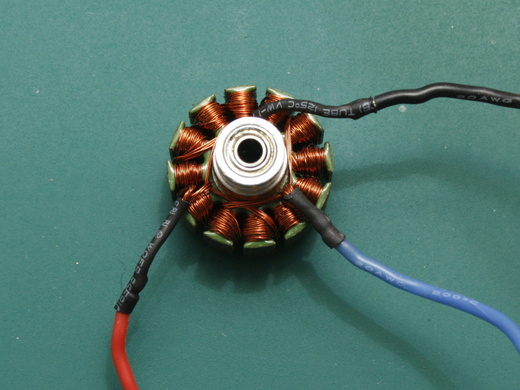
Běžný BLDC motor jich má 12, jsou to tedy vlastně 4 po sobě jdoucí motory, tím je zajištěn vysoký kroutící moment těchto motorů. Z každého přívodního vodiče jsou navinuty 4 cívky - první, čtvrtá, pátá a desátá a tak dále. Cívek může být i více, ale vždy to musí být násobek tří.
Magnetů v plášti není 12, ale 14. Je to z toho důvodu, že by se v případě 12 magnetů přitáhly a stále přitahovaly kladné a záporné póly a motor by se stále parkoval v "ustálené poloze" a neběžel by plynule, proto je výhodnější tam dát o dva magnety víc (13 být nemůže, protože ke každému zápornému pólu magnetu musí být i kladný, ale může jich být třeba 16 (na každou cívku 4).
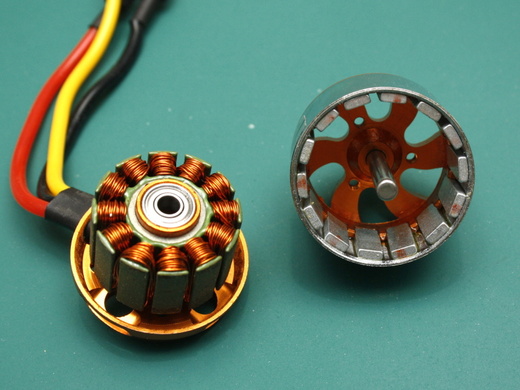
Magnety jsou nalepeny na kovový plášť a magnetické síly by ven neměly moc pronikat, způsobuje to ztráty a nižší účinnost. Můžeme si to ověřit přiložením například nezmagnetizovaného šroubováku na plášť motoru, neměl by se vůbec přitahovat, nebo jen minimálně a to i přesto, že milimetr od něj jsou velmi silné magnety. Kvalitně vyrobený motor by měl také při protáčení rukou jen minimálně cukat, v ideálním případě by se měl pohybovat téměř hladce - čím více, tím lépe. Pokud tomu tak není, neznamená to, že motor nepoběží, ale zatěžují se ložiska a vznikají ztráty působením magnetickým sil jiným směrem, než ve směru tečny ke kruhovému tvaru motoru.
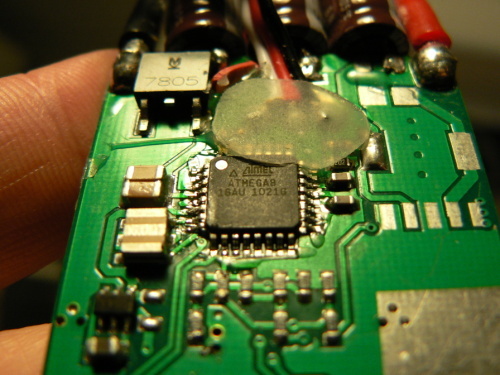
Jak se takový BLDC motor vůbec roztočí? Regulátor obsahuje výkonové tranzistory a jejich řídící obvody - viz hormí obrázek - (aby se každý sepnul ve správný okamžik) a v podstatě spojují ve správnou chvíli příslušné cívky s kladným nebo záporným pólem pohonné baterie. Tím se postupně mění polarita elektromagnetů - cívek a motor se točí. Způsob spínání je naprogramován v řídící jednotce regulátoru a jde měnit - to je ono programování regulátoru. U lepších regulátorů je možný i update firmware této řídící jednotky a tím dosažení napřídklad hladšího nebo přesnějšícho chodu motorů. To se týká hlavně regulátorů v multikoptérách, nás letadýlkáře to moc nemusí vzrušovat.
Regulátor potřebuje ale znát v každém momentu vzájemnou polohu pólů pernamentních magnetů rotoru a cívek statoru aby "věděl" jaké tranzistory má zrovna otevřít. U senzorových elektromotorů je to jednodušší - polohu udávají regulátoru snímače magnetického pole, připojené dalšími vodiči. U bezsenzorových BLDC motorů (těch je naprostá většina) se to řeší složitou analýzou indukovaného napětí, které vyrábí točící se rotor. Jenže když se motor netočí, žádné napětí se neindukuje, takže regulátor neví v jaké poloze je rotor vůči statoru. Motor se nejprve musí rozběhnout, takže regulátor pošle do motoru sérii impulzů, motor se "nějak" roztočí, indukuje nějaké počáteční napětí, které regulátor analyzuje a až potom ho regulátor začne přesně řídit. To je příčina, proč se po přidání plynu některé motory nejprve více rotočí a až potom začnou jít plynule za plynem.
Nevýhodou tohoto řešení je nízký kroutící moment v okamžiku rozběhu. U letadel s vrtulí to zas tak nevadí, ale vadí to u modelů aut, které musí mít velký kroutící moment již od minimálních otáček. Proto se senzorové motory a regulátory používají hlavně u modelů aut vyšších kategorií, běžná auta stále používají pokročilé verze kartáčových motorů.
Tolik k principu fungování, snad dostatečně srozumitelně vysvětleno pro většinu uživatelů. V příštích dílech se podíváme na rozměry a značení motorů, výkony a volby druhů motorů pro jednotlivé typy modelů.